| Fundamentals of Statistics contains material of various lectures and courses of H. Lohninger on statistics, data analysis and chemometrics......click here for more. |

|
Home  Bivariate Data Smoothing Savitzky-Golay Filter - Mathematical Details Bivariate Data Smoothing Savitzky-Golay Filter - Mathematical Details |
|
| See also: filters, Savitzky-Golay filter, coefficients, mathematical background of filters |   |
Savitzky-Golay Filter - Mathematical DetailsA polynomial filter can be considered as piece-by-piece fitting of a polynomial function to the signal. The fitting is done by a least squares (LS) estimate between the X matrix and the y vector:
The product H = X(XTX)-1XTy
is also called the hat matrix and is the same for any y for a given
polynomial. So it can be calculated once and stored for latter application.
This is what Savitzky and Golay have done for polynomials of various orders,
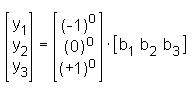
and pieces of different length n (original publication Note: The (n+1)th row of the H matrix gives the tabulated coefficients for the Savitzky-Golay filters. We only use the estimate for the middle point of the moving window for smoothing. The other rows are used only for the smoothing of the endpoint of the signal, when there are fewer data points left than the window size 2n+1. The matrix X is the so-called Vandermond matrix. When we want to fit a polynomial function of order p, we get a series of equations in the following form: In the case of n=1, x = [-1 0 +1] and we have:
resulting in the filtering coefficients b = [0 1 0]. In this case, actually no calculations would be performed, but rather the original values would be taken. For n=5 and p=3, the filtering coefficients are b= [-0.0857 0.3429 0.4857 0.3429 -0.0857]. As a special case, we can also derive the moving average, i.e. when we want to fit a constant line (a zeroth order polynomial).
|
|
| Home Bivariate Data Smoothing Savitzky-Golay Filter - Mathematical Details |
|


 ,
,